
波士頓動力機器人跪了!搬箱子不成反摔倒(4)
波士頓動力稍有動靜就會引發轟動,這次也不例外。一段最新流出的視頻顯示了波士頓動力的Atlas機器人試著搬箱子然后放到架子上——嘗試很久未果,最終無情倒下。此前...
大貓 WildCat:世界上最快的四足機器人
但是,說到迅捷,還是比不過波士頓動力的“大貓”。下圖顯示的這款名叫WildCat的機器人是世界上速度最快的四足機器人,速度為32公里/小時。(之前的記錄是MIT在1989年實現的21公里/小時。)
WildCat由甲醇發動機驅動,采用液壓驅動系統(因此跑動中“聲勢浩大”)。WildCat高1.17米,重154公斤,有14個關節,跑動中使用各種步態,包括小跑、跳躍和疾馳等保持平衡。目前,WildCat的演示都是在相對平坦的地面上運行。控制系統使用動態控制算法和各種傳感器(IMU,地面接收器,本體感覺,視覺測距)來控制和穩定運動。WildCat還使用一組激光測距儀來精確測量機器人的高度和與地面的距離。
WildCat的控制系統首先在獵豹機器人上開發,獵豹機器人(見下)是在實驗室里開發的一款原型機器人,運行速度為48公里/小時,比博爾特還快。當然,獵豹是在基本沒有風阻的室內跑步機上跑動,而且有一個非常大的遠程電源供電。
大狗 BigDog:一切從這里開始
說完大貓,正好接著說大狗。大狗可以說是波士頓動力的標志性機器人之一。相信大家已經有比較多的了解,畢竟大狗作為上述四足機器人的“始祖”業內已經有了很多介紹和分析。
大狗搭載的計算機能夠控制運動,處理傳感器,還能保持與用戶通信。與用戶通信這一點是后來增加的。大狗的控制系統能夠保持平衡,讓機器人在各種地形上運動,同時進行導航。運動傳感器包括關節位置、關節力、地面接觸、地面載荷、陀螺儀、激光雷達和立體視覺系統。其他傳感器集中在BigDog的內部,包括監控液壓、油溫、發動機功能、電池充電等。
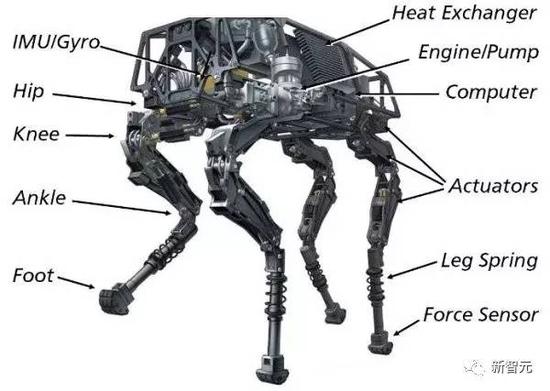
BigDog高1米,重109公斤,載重45公斤,使用汽油發動機,運行速度是10公里/時,有16個關節,能夠爬35度的坡地,穿越瓦礫,在泥濘、雨雪中前行。
六足機器人RHex
RHex是六足機器人的一種。獨立控制的腿部能產生專門的步態,在崎嶇的地形上推進,操作人員基本不用輸入。波士頓動力展示了RHEX穿越巖石、泥土、沙漠、植被、鐵軌和樓梯的場景。
RHex有前置攝像頭和后置攝像頭。機體的密封性使得RHEX在潮濕的天氣,泥濘和沼澤的條件下以及流體中運行。


人工智能機器人搶小編工作,還讓不讓人活?
過去10年,英國本地乃至全球的新聞行業一直處于衰落狀態。隨著讀者轉向互聯網和社交媒體獲取新聞,越來越少的紙媒受眾讓廣告商現在把錢花在別處。這導致了當地新聞記者的失業問...

機器人三定律有瑕疵,授權理念才能保護人類?
正如可以保護你、幫助你、支持你一樣,機器人也可能會傷害你。如何構建一套放之四海皆準的機器人行為原則,是科技工作者不得不面對的技術和倫理雙重難題。赫特福德大學的人工智...
機器人和人類將無法區分 "恐怖谷理論"要成真了?
在科幻小說和電影中,除了部分將機器人描繪成恐怖的殺人狂魔、試圖統治地球,大多數情況下機器人是人類的朋友、同事、仆人,甚至是情人。現如今,性愛機器人已經存在,而且越來越多的...

打過球的機器人來了 網紅機器人空降啤酒節
今年青島國際啤酒節繼續設立機器人大篷,更加注重互動、應用、體驗,打造一個與眾不同的科普教育場所。這其中不乏機器人明星,連跟總理握過手、打過球的機器人也來了。
...
中國工業機器人需求支撐日本制造業業績
日媒稱,中國需求正在支撐日本相關企業的業績。據《日本經濟新聞》網站5月5日報道,日本工廠自動化設備和機器人綜合制造商發那科4月27日發布的預測稱,截至2018年3月的2017財年合并營業利潤將同比增長1%,面向中國的工...